Variational Autoencoder (VAE) to generate handwritten digits
Contents
Variational Autoencoder (VAE) to generate handwritten digits#
Author: Johannes Maucher - adapted from keras autoencoder tutorial.
Last Update: 19.12.2022
Reference: D.P. Kingma, M. Welling: Autoencoder Variational Bayes
Autoencoder#
An autoencoder consists of an encoder- and a decoder-module. The encoder maps each input \(\mathbf{x}\) to a latent representation \(\mathbf{y}\), such that the decoder network is able to calculate a reconstruction \(\mathbf{z}\) from \(\mathbf{y}\), whereby \(\mathbf{z}\) must be as close as possible to the input \(\mathbf{x}\). The weights of the encoder- and decoder- module are learned by minimizing a loss-function, which measures the difference between the reconstruction \(\mathbf{z}\) and the original \(\mathbf{x}\). For this, standard gradient descent supervised learning algorithms, such as backpropagation can be applied. Even though the inputs must not be labeled (the target ist the input itself)!
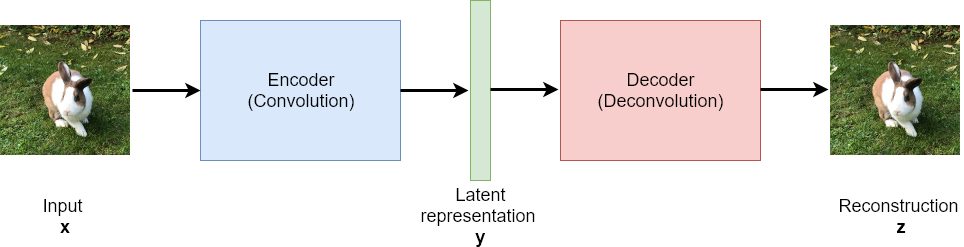
Usually the latent representation \(\mathbf{y}\) is much smaller, than the original \(\mathbf{x}\) and its reconstruction \(\mathbf{z}\). Hence, the entire process realizes a standard lossy compression, such as e.g. jpeg-encoding of images.
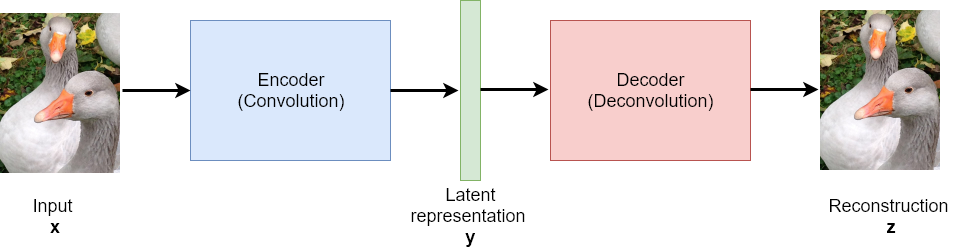
After training an autoencoder, all inputs, which are similar to inputs seen in the training phase, will be reconstructed well. However, inputs, which are totally different from the training-samples won’t be reconstructed well.
For example, if the autoencoder has been trained with many images from rabbits and geese, these two types of animals will be reconstructed well, but if no elephants has been in the training data, the trained network won’t be able to reconstruct elephants sufficiently.
Two import application categories of autoencoders are:
Representation Learning The latent representation \(\mathbf{y}\) can be considered to be a meaningful and efficient representation of the input \(\mathbf{x}\). This compressed representation contains all relevant information, since otherwise the original could not be reconstructed sufficiently.
Anomaly Detection: The autoencoder is trained only with normal cases. In the inference phase normal cases at the input yield a small error between the input and its reconstruction. However, non-normal cases can not be reconstructed well. Hence, a high reconstruction error is an indicator for anomalies.
Variational Autoencoder#
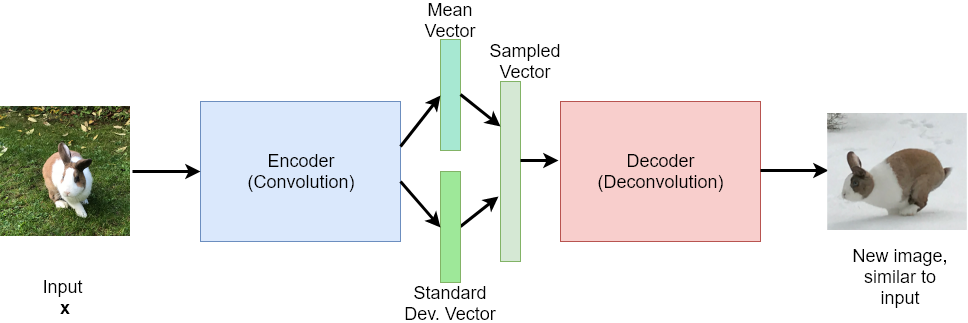
An autoencoder, as shortly described above, is not a generative model. It just tries to reconstruct the input, but it is not able to generate new data, e.g. new rabbit images or new geese images. This is where the Variational Autoencoder (VAE) comes in. A variational autoencoder is a generative model. A VAE, which has been trained with rabbit and geese-images is able to generate new rabbit- and geese images. A VAE, which has been trained with handwritten digit images is able to write new handwritten digits, etc.
In general, if the probability distribution of one or multiple random variable(s) is known, then new samples, which arise from this distribution can be generated. For example, if the parameters mean and standard-deviation of a Gaussian-distributed random variable are known, then new samples can be generated, which correspond to this distribution.
Based on this concept, a standard autoencoder can be modified to a generative model - the Variational Autoencoder - as follows: Instead of mapping the input \(\mathbf{x}\) to a latent representation \(\mathbf{y}\), the Encoder modul maps the input to a probability distribution. More concrete: A type of probability distribution (e.g. a Gaussian Normal Distribution) is presumed, and the output of the encoder are the concrete parameters of this distribution (e.g. mean and standard deviation for Gaussian distribution type). Then a concrete sample is generated from this distribution. This sample constitutes the input to the decoder.
The weights of the encoder and decoder-module are learned such that the output of the decoder is as close as possible to input - like in the case of an autoencoder, but now with the new process in the latent layer: parameter estimation and sampling.
Implementation of Variational Autoencoder#
#!pip install keras
import numpy as np
import matplotlib.pyplot as plt
from scipy.stats import norm
import tensorflow.compat.v1.keras.backend as K # see https://stackoverflow.com/questions/61056781/typeerror-tensor-is-unhashable-instead-use-tensor-ref-as-the-key-in-keras
import tensorflow as tf
tf.compat.v1.disable_eager_execution()
from keras.layers import Input, Dense, Lambda, Layer
from keras.models import Model
from keras import backend as K
from keras import metrics
from keras.datasets import mnist
from keras import losses
from keras.utils.vis_utils import plot_model
from os import environ
environ["CUDA_DEVICE_ORDER"]="PCI_BUS_ID"
environ["CUDA_VISIBLE_DEVICES"]="0"
batch_size = 100
original_dim = 784
latent_dim = 2
intermediate_dim = 256
epochs = 50
epsilon_std = 1.0
Define Architecture#
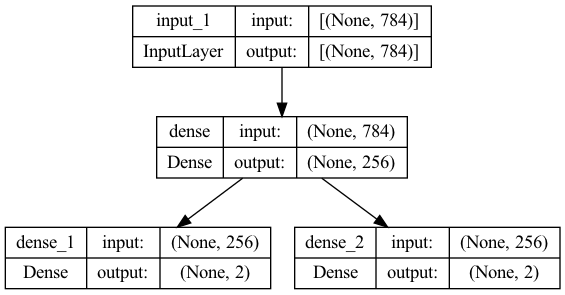
Encoder Model#
x = Input(shape=(original_dim,))
h = Dense(intermediate_dim, activation='relu')(x)
z_mean = Dense(latent_dim)(h)
z_log_var = Dense(latent_dim)(h)
Note, that the encoder outputs are interpreted to be the values and the logarithmic variance values.
encoderModel=Model(inputs=x, outputs=[z_mean, z_log_var])
encoderModel.summary()
Model: "model"
__________________________________________________________________________________________________
Layer (type) Output Shape Param # Connected to
==================================================================================================
input_1 (InputLayer) [(None, 784)] 0 []
dense (Dense) (None, 256) 200960 ['input_1[0][0]']
dense_1 (Dense) (None, 2) 514 ['dense[0][0]']
dense_2 (Dense) (None, 2) 514 ['dense[0][0]']
==================================================================================================
Total params: 201,988
Trainable params: 201,988
Non-trainable params: 0
__________________________________________________________________________________________________
plot_model(encoderModel, to_file='model_plot.png', show_shapes=True, show_layer_names=True)
Sampling#
Define function for sampling from a Gaussian Distribution:
def sampling(args):
z_mean, z_log_var = args
epsilon = K.random_normal(shape=(K.shape(z_mean)[0], latent_dim), mean=0.,stddev=epsilon_std)
return z_mean + K.exp(z_log_var / 2) * epsilon
In the sampling function defined above, epsilon is an array of samples from a Gaussian Normal Distribution with mean 0 and standard-deviation 1. In order to transform this sample into a sample with mean \(\mu\) and variance \(\sigma^2\), epsilon must be multiplied with the standard-deviation \(\sigma\) and added to mean \(\mu\). Since we do not have \(\sigma\) but only \(t=\log(\sigma^2)\)
Multiplication with \(\sigma\) is the same as multiplication with \(e^{t/2}\).
Implementation of the sampling function, as defined above, as a Keras layer:
z = Lambda(sampling, output_shape=(latent_dim,))([z_mean, z_log_var])
Decoder Model#
#instantiate these layers separately so as to reuse them later
decoder_h = Dense(intermediate_dim, activation='relu')
decoder_mean = Dense(original_dim, activation='sigmoid')
h_decoded = decoder_h(z)
x_decoded_mean = decoder_mean(h_decoded)
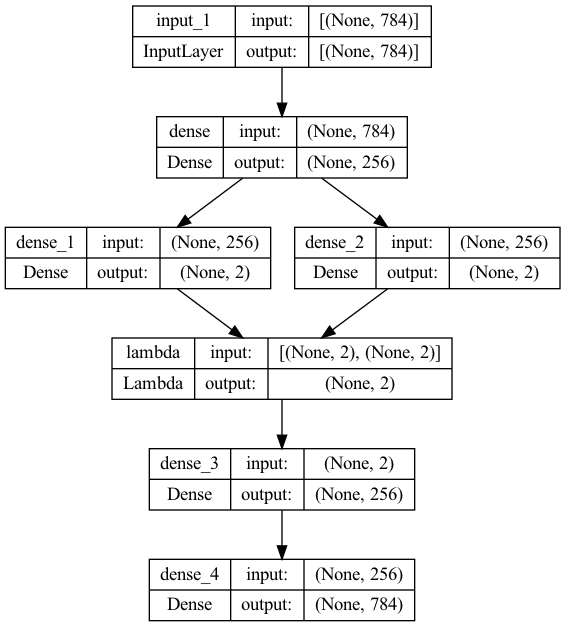
End-to-End Autoencoder#
# end-to-end autoencoder
vae = Model(x, x_decoded_mean)
vae.summary()
Model: "model_1"
__________________________________________________________________________________________________
Layer (type) Output Shape Param # Connected to
==================================================================================================
input_1 (InputLayer) [(None, 784)] 0 []
dense (Dense) (None, 256) 200960 ['input_1[0][0]']
dense_1 (Dense) (None, 2) 514 ['dense[0][0]']
dense_2 (Dense) (None, 2) 514 ['dense[0][0]']
lambda (Lambda) (None, 2) 0 ['dense_1[0][0]',
'dense_2[0][0]']
dense_3 (Dense) (None, 256) 768 ['lambda[0][0]']
dense_4 (Dense) (None, 784) 201488 ['dense_3[0][0]']
==================================================================================================
Total params: 404,244
Trainable params: 404,244
Non-trainable params: 0
__________________________________________________________________________________________________
plot_model(vae, to_file='vae_plot.png', show_shapes=True, show_layer_names=True)
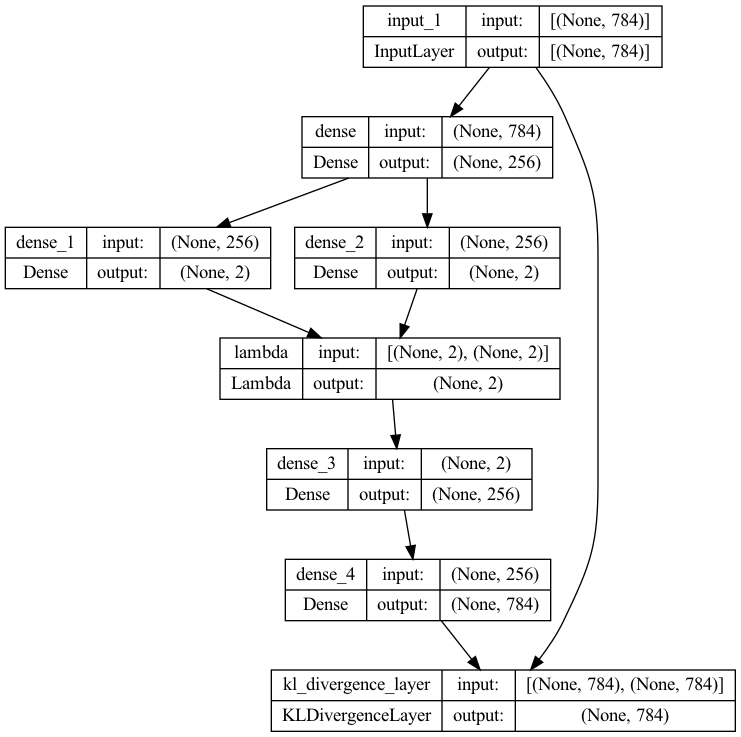
Define Layer for Custom Loss#
The parameters of the model are trained by minizing a loss function, which consists of two terms:
a reconstruction loss forcing the decoded samples to match the initial inputs. For this reconstruction loss binary crossentropy is applied.
the KL divergence between the learned latent distribution and the standard multidimensional Normal-distribution \(\mathcal{N(\mathbf{0},\mathbf{I})}\) (zero-mean and variance one). This term acts as a regularization term and forces the learned distribution to apporximate the standard multidimensional Normaldistribution. See e.g. https://leenashekhar.github.io/2019-01-30-KL-Divergence/ for the derivation of the KL-Divergence formula, implemented below.
In order to implement this custom loss function a corresponding layer is defined as follows:
class KLDivergenceLayer(Layer):
def __init__(self, **kwargs):
self.is_placeholder = True
super(KLDivergenceLayer, self).__init__(**kwargs)
def vae_loss(self, x, x_decoded_mean):
xent_loss = original_dim * metrics.binary_crossentropy(x, x_decoded_mean) # reconstruction loss
kl_loss = - 0.5 * K.sum(1 + z_log_var - K.square(z_mean) - K.exp(z_log_var), axis=-1) # regularisation term
return K.mean(xent_loss + kl_loss)
def call(self, inputs):
x = inputs[0]
x_decoded_mean = inputs[1]
loss = self.vae_loss(x, x_decoded_mean)
self.add_loss(loss, inputs=inputs)
# We won't actually use the output.
return x
y = KLDivergenceLayer()([x, x_decoded_mean])
vae = Model(x, y)
vae.compile(optimizer='rmsprop', loss=None)
WARNING:tensorflow:Output kl_divergence_layer missing from loss dictionary. We assume this was done on purpose. The fit and evaluate APIs will not be expecting any data to be passed to kl_divergence_layer.
plot_model(vae, to_file='vae_kl_plot.png', show_shapes=True, show_layer_names=True)
Training VAE#
# train the VAE on MNIST digits
(x_train, y_train), (x_test, y_test) = mnist.load_data()
x_train = x_train.astype('float32') / 255.
x_test = x_test.astype('float32') / 255.
x_train = x_train.reshape((len(x_train), np.prod(x_train.shape[1:])))
x_test = x_test.reshape((len(x_test), np.prod(x_test.shape[1:])))
hist=vae.fit(x_train,
shuffle=True,
epochs=epochs,
batch_size=batch_size,
validation_data=(x_test, None),
verbose=False)
2022-12-20 15:52:31.167022: I tensorflow/core/platform/cpu_feature_guard.cc:193] This TensorFlow binary is optimized with oneAPI Deep Neural Network Library (oneDNN) to use the following CPU instructions in performance-critical operations: AVX2 FMA
To enable them in other operations, rebuild TensorFlow with the appropriate compiler flags.
2022-12-20 15:52:31.213861: I tensorflow/compiler/mlir/mlir_graph_optimization_pass.cc:354] MLIR V1 optimization pass is not enabled
/Users/johannes/opt/anaconda3/envs/books/lib/python3.8/site-packages/keras/engine/training_v1.py:2045: UserWarning: `Model.state_updates` will be removed in a future version. This property should not be used in TensorFlow 2.0, as `updates` are applied automatically.
updates = self.state_updates
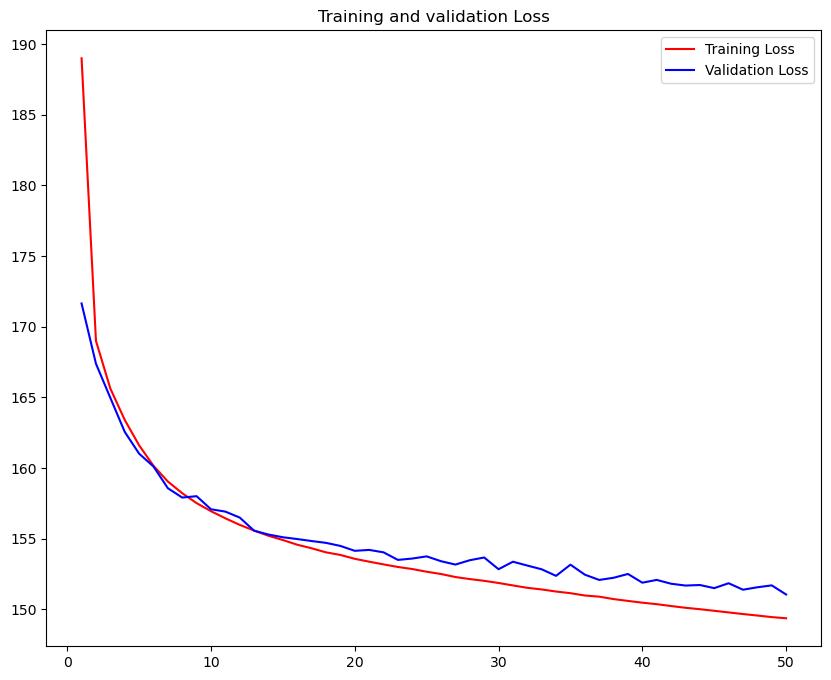
loss = hist.history['loss']
val_loss = hist.history['val_loss']
max_val_acc=np.max(val_loss)
epochs = range(1, len(loss) + 1)
plt.figure(figsize=(10,8))
plt.plot(epochs, loss, 'r', label='Training Loss')
plt.plot(epochs, val_loss, 'b', label='Validation Loss')
plt.title('Training and validation Loss')
plt.legend()
plt.show()
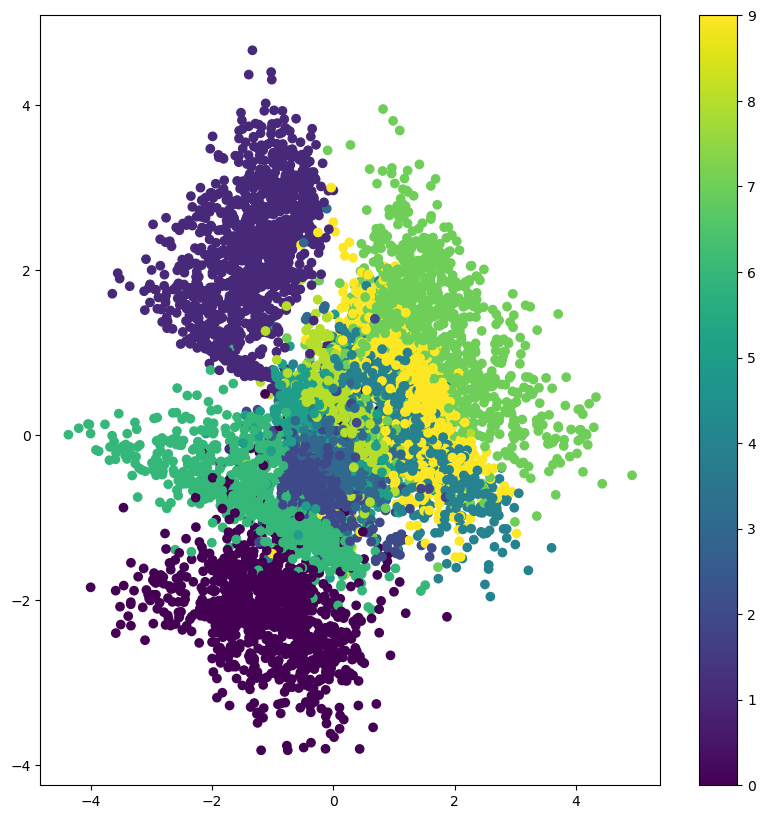
Project Inputs to latent space#
encoder = Model(x, z_mean)
# display a 2D plot of the digit classes in the latent space
x_test_encoded,_ = encoderModel.predict(x_test, batch_size=batch_size)
plt.figure(figsize=(10, 10))
plt.scatter(x_test_encoded[:, 0], x_test_encoded[:, 1], c=y_test)
plt.colorbar()
plt.show()
/Users/johannes/opt/anaconda3/envs/books/lib/python3.8/site-packages/keras/engine/training_v1.py:2067: UserWarning: `Model.state_updates` will be removed in a future version. This property should not be used in TensorFlow 2.0, as `updates` are applied automatically.
updates=self.state_updates,
Build Digit Generator#
Next, a digit generator, which samples from the learned distribution is build.
decoder_input = Input(shape=(latent_dim,))
_h_decoded = decoder_h(decoder_input)
_x_decoded_mean = decoder_mean(_h_decoded)
generator = Model(decoder_input, _x_decoded_mean)
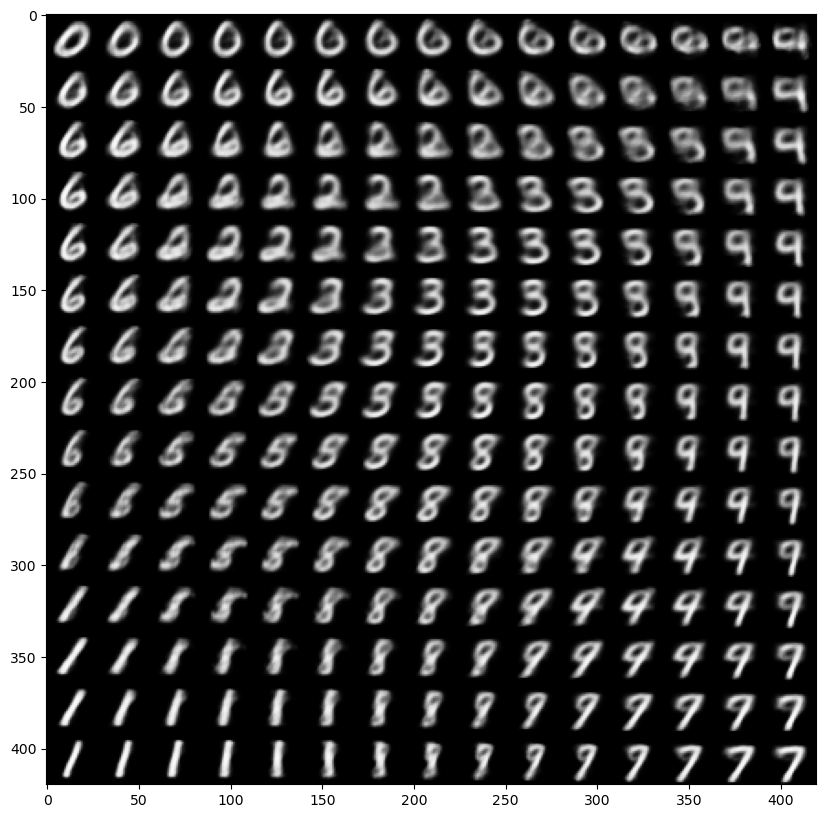
# display a 2D manifold of the digits
n = 15 # figure with 15x15 digits
digit_size = 28
figure = np.zeros((digit_size * n, digit_size * n))
# linearly spaced coordinates on the unit square were transformed through the inverse CDF (ppf) of the Gaussian
# to produce values of the latent variables z, since the prior of the latent space is Gaussian
grid_x = norm.ppf(np.linspace(0.05, 0.95, n))
grid_y = norm.ppf(np.linspace(0.05, 0.95, n))
for i, yi in enumerate(grid_x):
for j, xi in enumerate(grid_y):
z_sample = np.array([[xi, yi]])
x_decoded = generator.predict(z_sample)
digit = x_decoded[0].reshape(digit_size, digit_size)
figure[i * digit_size: (i + 1) * digit_size,
j * digit_size: (j + 1) * digit_size] = digit
plt.figure(figsize=(10, 10))
plt.imshow(figure, cmap='Greys_r')
plt.show()