
Example: Naive Bayes Object Recognition¶
Author: Johannes Maucher
Last Update: 24.02.2021
This notebook demonstrates the concept of probabilistic object recognition as introduced in [SC00] and described in the previous section.
The simple model applied here assumes that for 3 different objects 1-dimensional histograms of an arbitrary feature (e.g. the pixel-values of a greyscale image) have been estimated from training data. The entire value range is partitioned into 8 bins. In a new picture 4 measurements of the same feature have been performed. The 4 measurements belong to bins \(2,5,6\) and \(2\). The Naive Bayes Classifier approach is applied to determine which of the 3 known objects has the maximum probability to be contained in the new picture, given the 4 measurements.
from matplotlib import pyplot as plt
import numpy as np
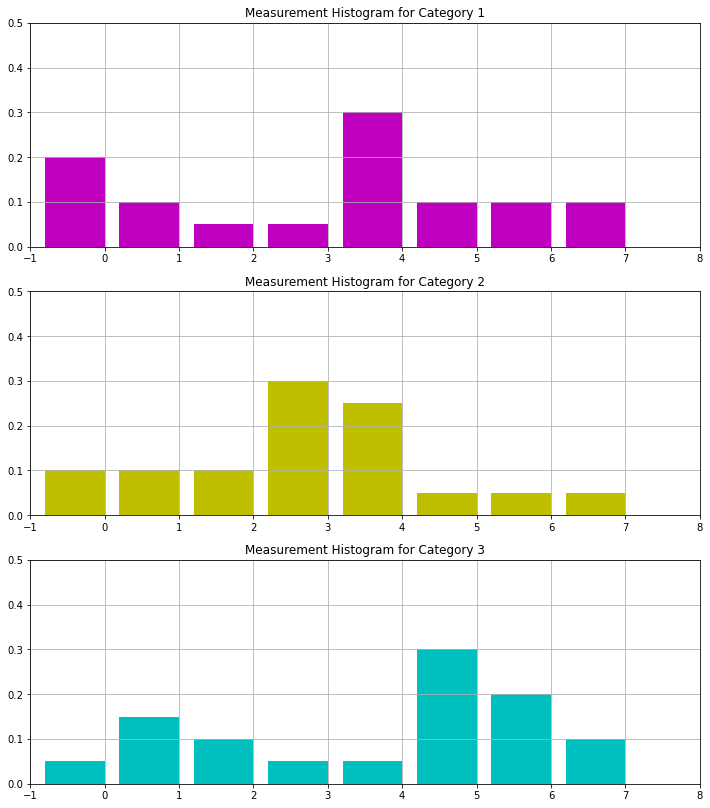
It is assumed that the 1-dimesional histograms of the 3 different objects are known. These histograms are defined and visualized below:
hist1=np.array([0.2,0.1,0.05,0.05,0.3,0.1,0.1,0.1])
hist2=np.array([0.1,0.1,0.1,0.3,0.25,0.05,0.05,0.05])
hist3=np.array([0.05,0.15,0.1,0.05,0.05,0.3,0.2,0.1])
histarray=np.array([hist1,hist2,hist3])
plt.figure(figsize=(12,14))
colors=['m','y','c']
print(histarray.shape)
for i in range(3):
plt.subplot(3,1,i+1)
plt.bar(np.arange(8)-0.4,histarray[i,:],color=colors[i])
plt.xlim((-1,8))
plt.ylim((0,0.5))
plt.grid(True)
plt.title('Measurement Histogram for Category '+str(i+1))
(3, 8)
For a query picture it shall be determined, which of the 3 known objects is most probably contained in the picutre. For this 4 measurements are performed in the picture. The measurements \(m_i\) fall into bins \(m_1=2,m_2=5,m_3=6\) and \(m_4=2\).
newMeas=np.array([2,5,6,2])
Naive Bayes classification is implemented in the few lines of codes below. The a-posteriori likelihood
is calculated for all 3 objects. Here it is assumed that the a-priori probability of each object is the same \(p(o_i)=\frac{1}{3}\) for \(i \in [1,2,3]\), i.e. it can be disregarded for classification task:
prob=[1.0,1.0,1.0]
for p in range(len(prob)):
for m in range(len(newMeas)):
prob[p]=prob[p]*histarray[p,newMeas[m]]
sumprob=np.sum(prob)
for p in range(len(prob)):
print("Probability for object "+str(p+1),prob[p]/sumprob)
print("Recognized object: ",np.argmax(prob)+1)
Probability for object 1 0.03846153846153847
Probability for object 2 0.03846153846153847
Probability for object 3 0.923076923076923
Recognized object: 3
The classifier finds that object 3 is most probably contained in the query picture.