
HOG-based Pedestrian Detection¶
Author: Johannes Maucher
Last update: 03.03.2021
The extraction of HoG-descriptors from image-patches has been demonstrated step-by-step in notebook HoGfeatures.ipynb. Fortunately, we do not have to implement each of these steps by ourselves. Instead we can apply libraries, which already provide functions that calculate HoG-descriptors. In this notebook we demonstrate how the opencv HOGDescriptor can be applied to
calculate the HoG-descriptor of an image-patch
detect all persons in a given image.
References:
opencv documentation of HOGDescriptor
configuration remarks on stackoverflow
Blog-Post on HoG-based person detection
Another Blog-Post on HoG-based person detection:
#!pip install imutils
%matplotlib inline
import cv2
import imutils
import numpy as np
from imutils.object_detection import non_max_suppression
from matplotlib import pyplot as plt
imagePath="../Data/mo.png"
image = cv2.imread(imagePath)
print(type(image))
plt.figure(figsize=(12,10))
plt.axis("off")
plt.imshow(image)
plt.show()
#orig = image.copy()
<class 'numpy.ndarray'>

Compute Hog-descriptor for image patch¶
In order to compute the HoG-descriptor for an image patch, first a HOGDescriptor-object has to be generated. Then this object’s compute()-method has to be invoked, which returns the descriptor for the specified patch.
A HOGDescriptor-object with default parameters can be instantiated as follows:
hog = cv2.HOGDescriptor()
#help(cv2.HOGDescriptor())
It is also possible to configure the object with individual parameters:
winSize = (64,128) # size of the patch, for which HoG-descriptor shall be calculated
blockSize = (16,16) # size of the super-region, over which histogram are normalized
blockStride = (8,8) # step-size for shifting the super-region window
cellSize = (8,8) # size of region, for which a single histogram shall be extracted
nbins = 9 # number of bins in the histogram
derivAperture = 1
winSigma = 4.
histogramNormType = 0
L2HysThreshold = 2.0000000000000001e-01
gammaCorrection = 0
nlevels = 64
hog = cv2.HOGDescriptor(winSize,blockSize,blockStride,cellSize,nbins,derivAperture,winSigma,
histogramNormType,L2HysThreshold,gammaCorrection,nlevels)
Next, the compute()-method of the HOGDescriptor-object hog is invoked for calculating the HoG-descriptors of the defined image-patch. In the code cell below the descriptors of the \((64,128)\)-size patch in the upper left region of the image is calculated. It is a vector of length 3780.
winStride = (16,16)
padding = (8,8) #border around the defined patch is included into the HoG-Descriptor (provides context information)
locations = ((0,0),) #multiple locations can be defined here
#hist = hog.compute(image) #calculates hog-desciptor over entire image, with default winStride = (8,8)
#hist = hog.compute(image,winStride) #calculates hog-desciptor over entire image, with the defined winStride as shift between adjacent image patches
#hist = hog.compute(image,winStride,padding)
hist = hog.compute(image,winStride,padding,locations)
print(hist.shape)
(3780, 1)
First 36 bins components of the HoG-descriptor and check if this first part of the HoG-descriptor is actually normallized:
print("L2-Norm of first 36 bins (4 HoGs within one super-region): {0:1.3f}".format(np.linalg.norm(hist[:36],ord=2)))
print(hist[:36])
print(np.sqrt(np.sum(hist[:36]**2)))
L2-Norm of first 36 bins (4 HoGs within one super-region): 0.998
[[0.10601729]
[0.07673807]
[0.0649855 ]
[0.02065422]
[0.35392162]
[0.00805591]
[0.05674358]
[0.09173512]
[0.093297 ]
[0.08724247]
[0.20235252]
[0.20124237]
[0.03218067]
[0.35392162]
[0.04375343]
[0.06293514]
[0.03583387]
[0.04311533]
[0.12474634]
[0.09762604]
[0.0747407 ]
[0.02655543]
[0.35392162]
[0.05397325]
[0.15274493]
[0.12854901]
[0.10992992]
[0.15319496]
[0.2227499 ]
[0.23004755]
[0.06804734]
[0.35392162]
[0.18343164]
[0.28703865]
[0.11235818]
[0.09268625]]
0.9982305
Person Detection based on HoG-Descriptors¶
HoG-descriptors can be applied e.g. for the detection of objects of a specific category in an image. They have been proven to be particularly good in pedestrian-detection (Dalal and Triggs; Histograms of Oriented Gradients for Human Detection.)
For the task of pedestrian detection
a large set of HoG-descriptors must be generated. Each of these descriptors must be labeled with the corresponding class-index, which indicates wether there is a pedestrian in the image-patch or not.
a part of the labeled HoG-descriptors is used for training a classifier, e.g. a Support-Vector-Machine (SVM) or a Multi-Layer-Perceptron (MLP).
The other part of the labeled HoG-descriptors is applied for evaluation of the trained classifier
The training-process is described in detail in this Blog-post in HoG-based object detection.
The opencv-library already provides a trained SVM for pedestrian detection. This classifier can be accessed via the HoGDescriptor-object as demonstrated in the code-cells below:
hog = cv2.HOGDescriptor()
hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())
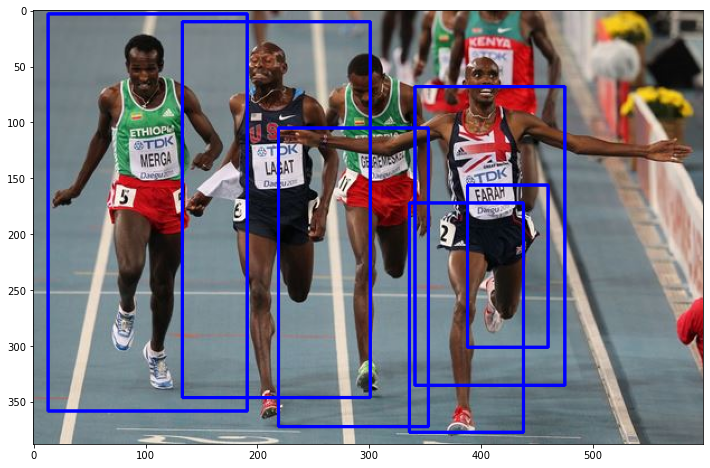
After setting of the SVM-Detector as in the code-cell above, the detectMultiScale()-method can be applied to detect people in the image in multiple scales. The method returns the coordinates of bounding boxes around the detected people:
# detect people in the image
(rects, weights) = hog.detectMultiScale(image, winStride=(4, 4),padding=(8, 8), scale=1.1)
print(rects)
print(weights)
[[336 172 102 205]
[388 156 72 145]
[341 68 134 267]
[219 105 134 267]
[133 10 168 336]
[ 13 3 178 355]]
[[0.44302808]
[0.81805863]
[0.54987878]
[0.93047954]
[0.49410774]
[1.49478267]]
orig = image.copy()
# draw the original bounding boxes
for (x, y, w, h) in rects:
cv2.rectangle(orig, (x, y), (x + w, y + h), (0, 0, 255), 2)
plt.figure(figsize=(12,10))
plt.imshow(orig)
plt.show()
Sometimes many bounding boxes strongly overlap, i.e. they have a high ratio of intersection. These bounding boxes usually refer to the same object. Since, each object shall be detected only once, the overlapping bounding boxes are usually mapped to a single one - typically the largest one. This technique is called Non-Maxium-Suppression. It is implemented e.g. in the imutils library and can be applied like in the code-cell below:
rects = np.array([[x, y, x + w, y + h] for (x, y, w, h) in rects])
pick = non_max_suppression(rects, probs=None, overlapThresh=0.65)
orig = image.copy()
plt.figure(figsize=(12,10))
# draw the final bounding boxes
for (xA, yA, xB, yB) in pick:
cv2.rectangle(orig, (xA, yA), (xB, yB), (0, 255, 0), 2)
plt.imshow(orig)
plt.show()
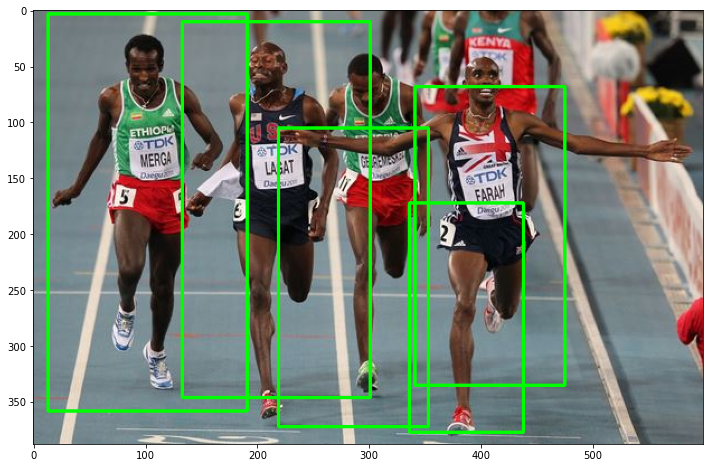
# show some information on the number of bounding boxes
filename = imagePath[imagePath.rfind("/") + 1:]
print("[INFO] {}: {} original boxes, {} after suppression".format(filename, len(rects), len(pick)))
[INFO] mo.png: 6 original boxes, 5 after suppression
Person Tracking in Video¶
The following code-cell demonstrates how detection of pedestrians in images can be applied to track pedestrians in videos. The applied video is provided by and can be downloaded from this EPFL CVLAB page.
file="../Data/4p-c1.avi"
#file="../6p-c3.avi"
cam = cv2.VideoCapture(file)
print("Video Properties:")
print("\t Width: ",cam.get(cv2.CAP_PROP_FRAME_WIDTH))
print("\t Height: ",cam.get(cv2.CAP_PROP_FRAME_HEIGHT))
#print "\t FourCC: ",cam.get(cv2.CAP_PROP_FOURCC)
print("\t Framerate: ",cam.get(cv2.CAP_PROP_FPS))
NofFrames=cam.get(7)
print(("\t Number of Frames: ",NofFrames))
frameCount=0
while True and frameCount<NofFrames:
img2 = cam.read()[1]
frameCount+=1
try:
(rects, weights) = hog.detectMultiScale(img2,winStride=(4, 4),padding=(8, 8), scale=1.15)
# draw the original bounding boxes
for (x, y, w, h) in rects:
cv2.rectangle(img2, (x, y), (x + w, y + h), (0, 0, 255), 2)
# apply non-maxima suppression to the bounding boxes
rects = np.array([[x, y, x + w, y + h] for (x, y, w, h) in rects])
pick = non_max_suppression(rects, probs=None, overlapThresh=0.65)
# draw the final bounding boxes
for (xA, yA, xB, yB) in pick:
cv2.rectangle(img2, (xA, yA), (xB, yB), (0, 255, 0), 2)
cv2.imshow("Video",img2)
except:
print("Frame can not be displayed")
if cv2.waitKey(33) == 27:
break
cam.release()
cv2.destroyAllWindows()
Video Properties:
Width: 360.0
Height: 288.0
Framerate: 25.0
('\t Number of Frames: ', 3915.0)